|
 SEISMIC DATA ENHANCEMENT BASICS
SEISMIC DATA ENHANCEMENT BASICS
After seismic data is acquired in the field, data
processing and data enhancement at a computer center is the next
step. This page reviews the basic processing techniques
typically applied to common depth point (CDP) land and marine
seismic data. Marine sparker seismic data processing is covered
in the last Section on this webpage. The objective is to provide
a basic grounding in seismic processing for petrophysicists,
geologists, reservoir engineers, and geotechs so that they
understand the common processing steps and terminology. Many
trade names and acronyms are used in the industry for individual
processing steps – the few used here are for illustration only
and don’t represent endorsement of any particular process or
product.
Below are the individual processing steps, described in the order in
which they are applied. Some are applied only on marine data, some
to both land and marine data, as noted in the text. Difficult data
has been purposely chosen for the examples so that the results may
be judged “normal” as opposed to “near-perfect” conditions.
TIME VARIANT PREDICTIVE DECONVOLUTION
The purpose of predictive
deconvolution is to remove reverberations or ringing effects from
seismic records caused by the source bubble and water bottom
multiple reflections – two issues that do not affect land seismic
data processing. The procedure in predictive deconvolution is to
design a least squares filter whose output is the inverse of the
reverberating train of the input. Then by delaying this output and
convolving it with the wavelet complex, we should be left with the
primary reflection only.
If we let:
[fi]
ni = 0 = filter coefficients
[xi]
= input trace
[ri]
ni = 0 = autocorrelation coefficients of the input
(primary)
[bi] ni = 0 = cross
correlation coefficients of the desired output and actual
input (reverberating train and primary).
Then we can solve for [fi] ni = 0 by solving
the set of equations:
f0 r0
+ f1 r1 + ………………………………………………fn rn
= b0
f0 r1
+ f1 r0 + ………………………………………………fn rn
-1 = b1
f0 r2
+ f1 r1 + ………………………………………………fn rn
-2 = b2
f0 rn
+ f1 rn-1 + ………………………………………………fn r0
= bn
With the automatic marine
option the program computes its own gate start times and prediction
distances from the parameters geophone distance, water velocity,
water bottom depth, gun depth and streamer depth. The program will
attempt to calculate parameters for the number of gates requested
(maximum of five gates). If this is not possible, because of
insufficient room to grade operators then the program will decrease
the number of gates until only the water bottom multiples present
are covered.
An automatic mute is calculated for each trace so that the
deconvolution operator does not transfer noise from within the water
layer to the zone below the water bottom.
User defined gates may optionally be used by supplying gate start
time, prediction distances and correlation window sizes for all
gates which are to be used for all traces on the record.
To perform predictive convolution on a seismic record by means of
successive iterations, the program automatically computes a
prediction time from the autocorrelation of the input trace and uses
this time to design the first prediction operator. After this
operator has been applied, a new autocorrelation is calculated and a
second operator is designed and so on. In this way, an operator for
each reverberating wave train may be computed and applied
separately. The computation of this normalized autocorrelation is
independent of the unnormalized autocorrelation used in the
predictive operator calculation. As an option, the program will
output the prediction time for each iteration.
With this program, the number of iterations is usually set equal to
the number of different reverberation periods which are present on
the data. The following section of this paper displays examples and
autocorrelations before and after successive iterations.
DECONVOLUTION AND BANDPASS FILTER
ANALYSIS
Analysis of the predominate reverberant periods and the frequency
content of the data is an important early step in the definition of
the processing parameters and sequence.
A standard analysis consists of a non-deconvolved record compared to
records deconvolved using several methods, with their respective
autocorrelations. The examples below show several interesting
results:
1.
The bubble period (from the autocorrelation of the non-deconvolved
record) is approximately 110 ms long.
2.
The water bottom multiple is 920 ms long.
3.
Predictive deconvolution with a short (36 ms) prediction distance
and 1664 ms operator length effectively eliminates the bubble (see
second record from right hand side of displays).
4.
Predictive deconvolution with a longer (850 ms) prediction distance,
164 ms operator, effectively eliminates the water bottom multiple
(see third record from the right hand side of examples).
5.
Therefore, if iterative predictive deconvolution is used, this
process should be run twice as shown by the fourth record from the
right hand side of the examples. This effectively eliminates both
types of reverberation events. For economy, the bubble can be
eliminated before stack and the water bottom multiple can be
eliminated after stack.
Bandpass filter parameters are then chosen from the harmonic
analysis after deconvolution. The chosen time variant filter is
shown in colour on both harmonics. This analysis is performed
periodically along the project lines, so that some control over
changing water depth effect and geologic conditions is obtained.
Since the predictive deconvolution programs self-design operators
from water depth and spread geometry when the marine option is used,
or the autocorrelation amplitudes of the reverberating events when
the iterative option is used, it is usually only necessary to test
predictive deconvolution in a few selected locations.
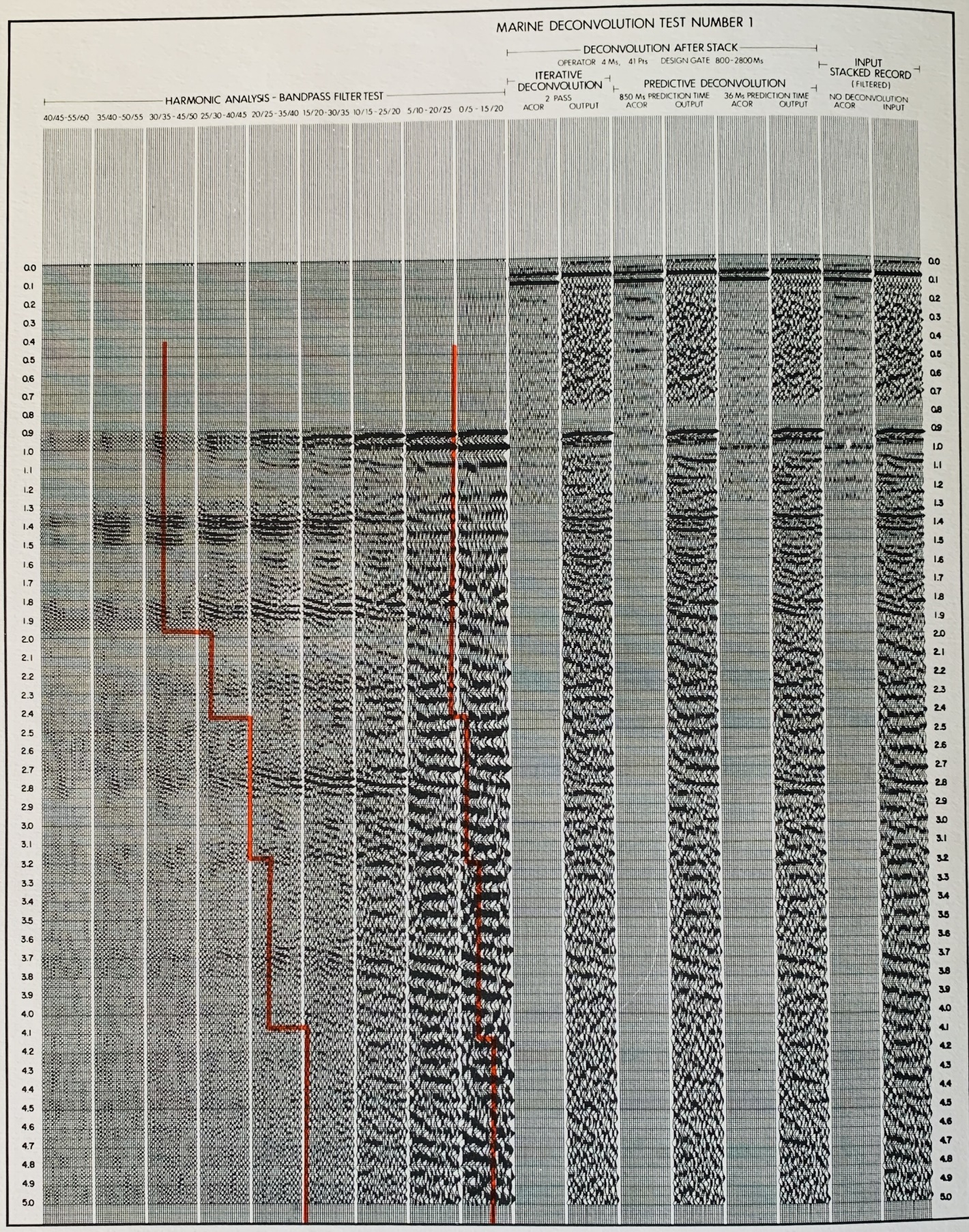
Marine Deconvolution Test Number 1, showing Harmonic Analysis -
Bandpass Filter Test (tracks 1 - 9), Deconvolution after Stack
(tracks 10 - 15), Input Stacked Record, No Deconvolution (tracks 16
- 17).
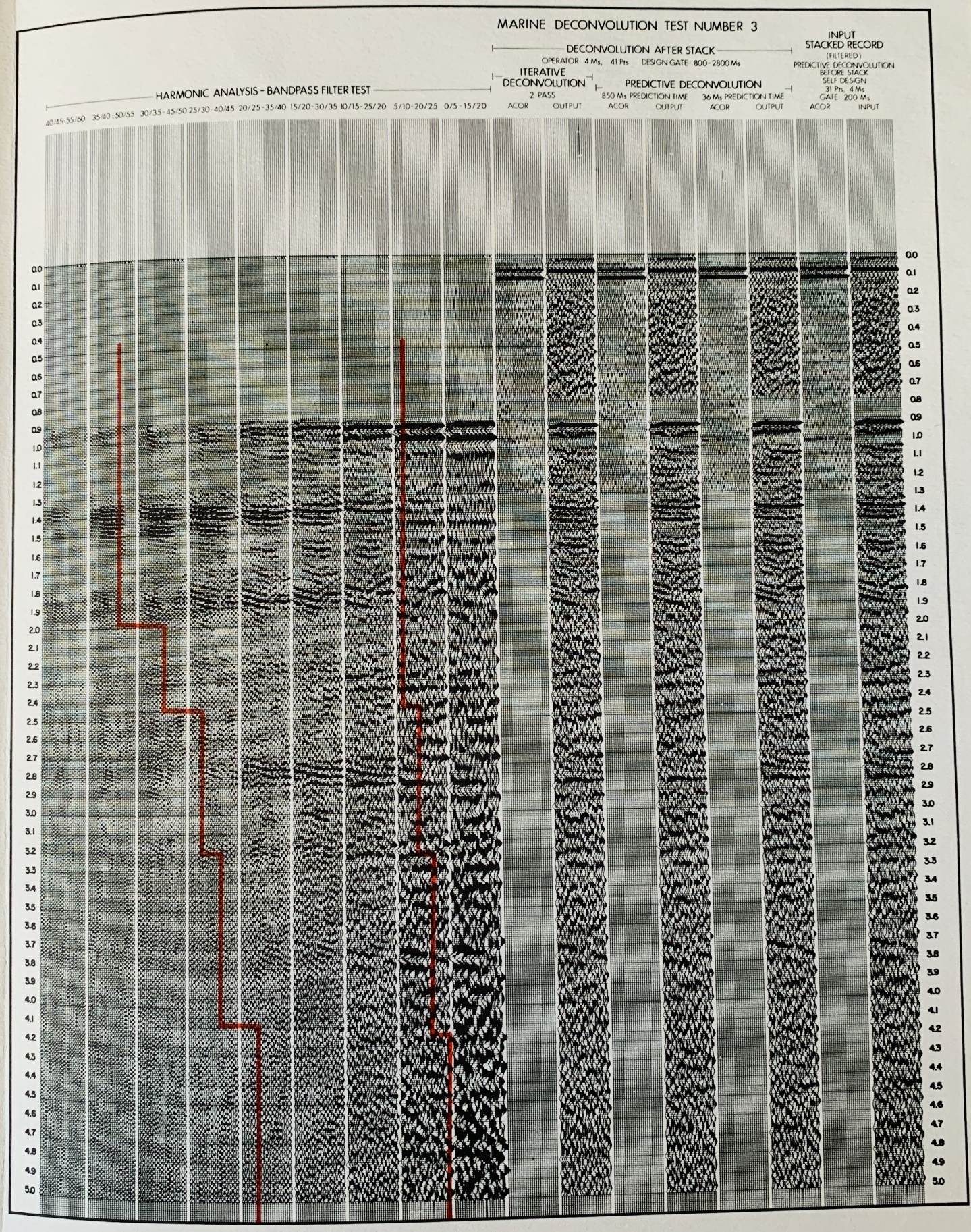
Marine Deconvolution Test Number 3, showing Harmonic Analysis -
Bandpass Filter Test (tracks 1 - 9), Deconvolution after Stack
(tracks 10 - 15), Input Stacked Record,
Predictive Deconvolution before Stack, Self-Design
(tracks
16 - 17).
PREDICTIVE DECONVOLUTION EXAMPLE
After analysis and testing for deconvolution and filter parameters,
the proof of any system is in the results of production processing.
A deep water example is illustrated below (Fig 2). The section
shown is highly faulted, but without too much throw on an individual
fault. More recent sediments overlie the faulted blocks, and the
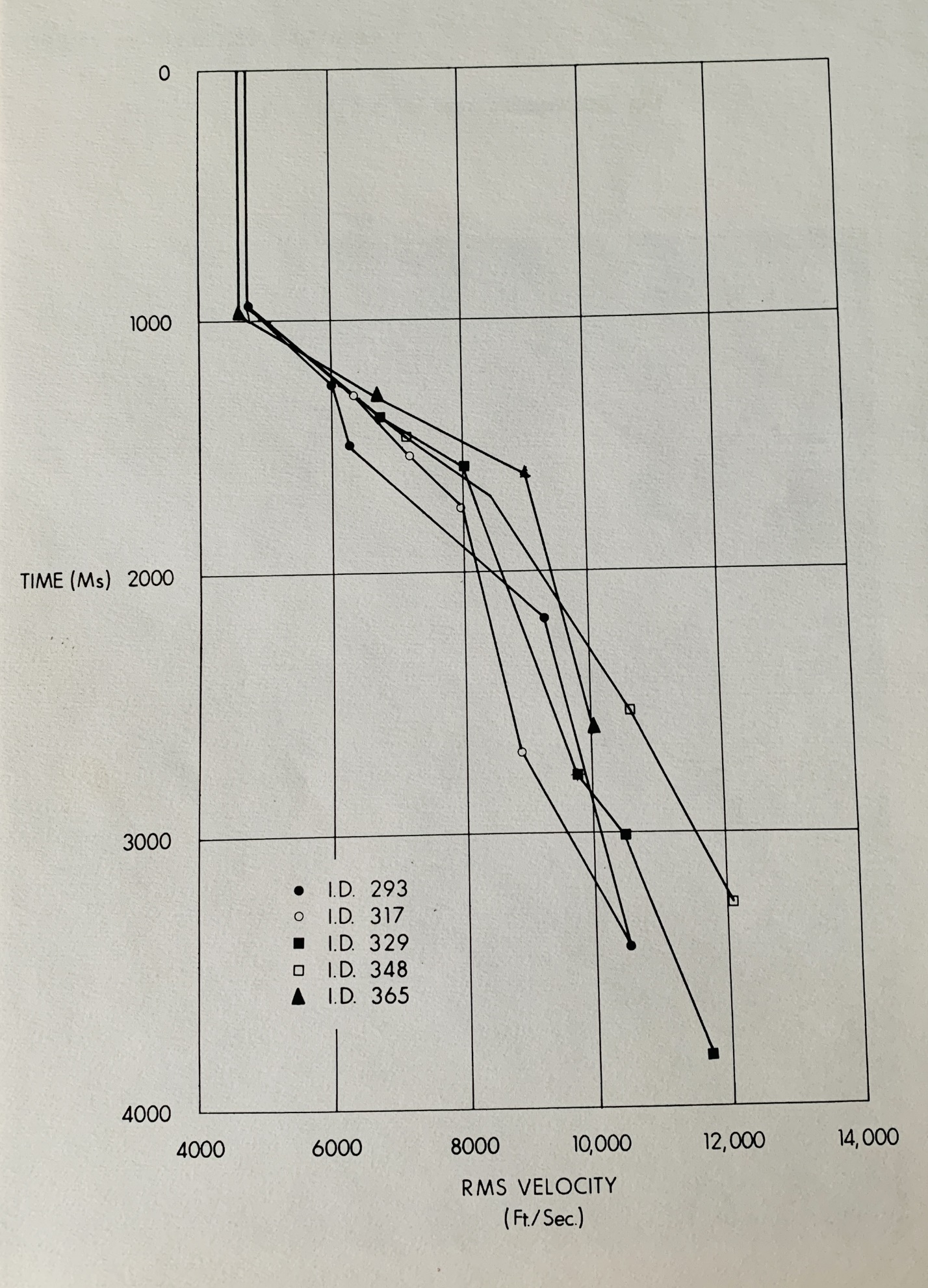
velocity analysis (Fig 3) indicates interval velocities of 12,000 to
14,000 feet per second immediately below water bottom. (See
interpretive overlay on deconvolved section). A wedge of low
velocity material (7600 ft/sec) exists on the right hand side,
followed by sections of approximately 10-12,000 ft/sec., 15-16,000
ft/sec., 10-11,000 ft/sec. and terminating in a rather indefinite
series of interval velocities of about 17,000 ft/sec.
This series of interval velocities typifies one of the most serious
seismic exploration problems, namely a very hard water bottom, with
the attendant reduction in energy penetration and the strong
multiple to primary energy ratio. Predictive deconvolution is one
of the most effective tools for elimination of such multiples; at
approximately 2.0 seconds the multiple has been virtually eliminated
by this method.
Note also that the multiple attenuation is not significantly aided
by differential normal moveout, since the data was shot with a 12
trace cable (200 ft. group interval, 855 ft. offset), the data is
only stacked 6 fold, and normal moveout is small due to the high
average velocity of the section.
Other multiples, in particular peg-leg multiples generated at the
14,000-11,000 ft/sec. interface (the reflection at 1.5 seconds,
right hand edge of example), are also present. These events are
evident on all the velocity analyses and the average velocities
suggest that they cannot be primary reflections. These also
interfere with legitimate primaries and are extremely difficult to
remove from the section. Other methods, to be described in later
sections of this paper may be effective.
Because of the rapid decrease in energy penetration, scaling of the
final section becomes another matter of concern. Consider, for
example, a section with virtually no primary energy. If predictive
deconvolution was used to eliminate all bubbles and water bottom
multiples, then the resulting section would be very low in
amplitude, and only the water bottom event would be visible.
Unfortunately, the relative amplitudes are seldom retained after
deconvolution and some form of scaling is normally used to obtain a
fairly constant RMS amplitude over the entire trace. If primary
energy does not appreciably contribute to the RMS calculation, the
amplitude of the residual bubble and multiple after decon will be
raised to nearly its original level. It then appears as if the
deconvolution was ineffective and has in fact made the record
noisier. This is far from the case, as seen in the example below
(Fig 4). The two sections show a portion of the previous example
before and after scaling, scaled in such a way that the water bottom
reflection amplitudes are identical in both cases. The decon has
obviously attenuated the reverberations, but the data dependent
scaling has enhanced the 2nd and 3rd bounce
multiples at the expense of the primary reflections. Thus, it is
important to appreciate the effects of time variant scaling on the
result of a de-reverberated section.
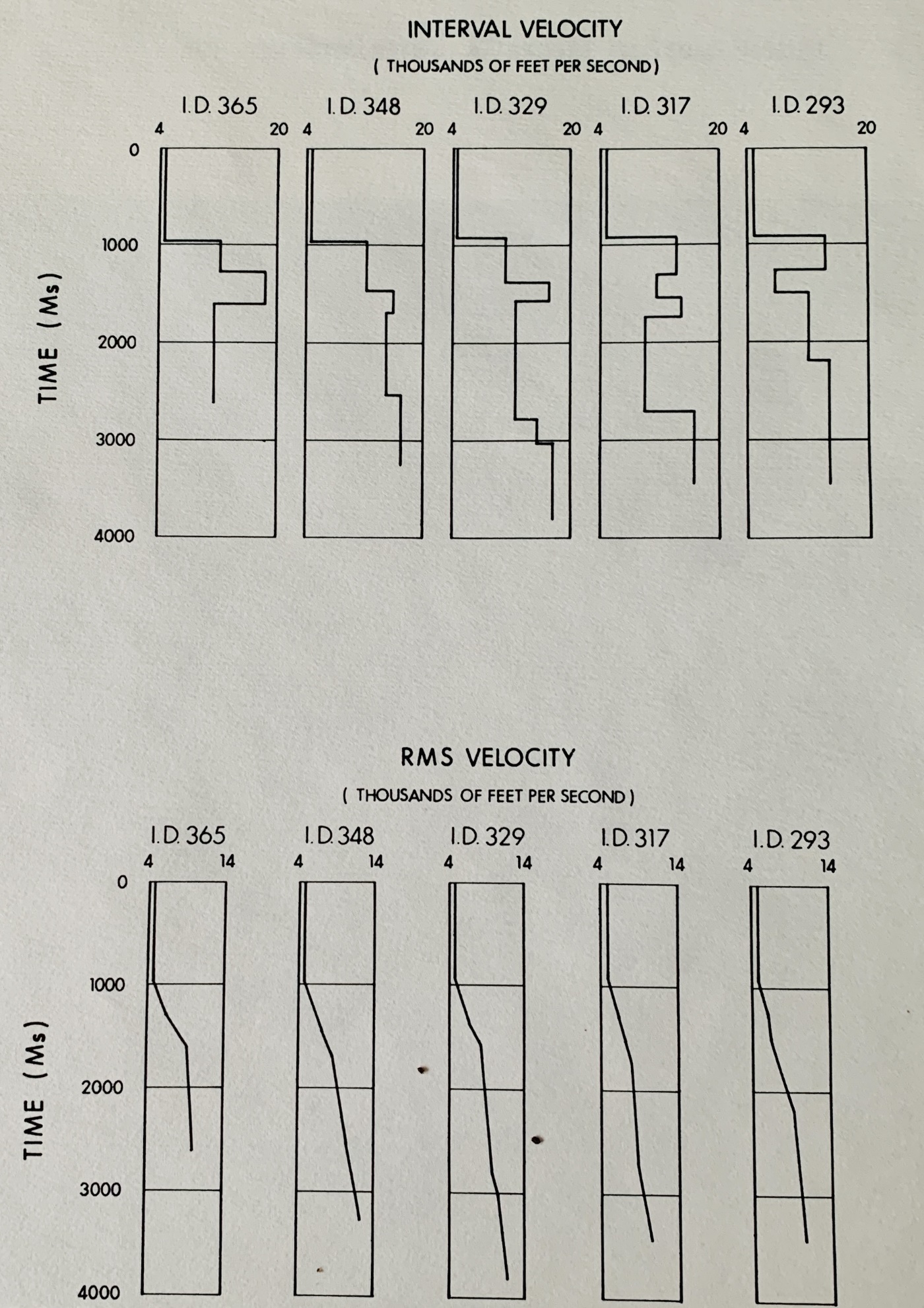
Interval Velocity Graph
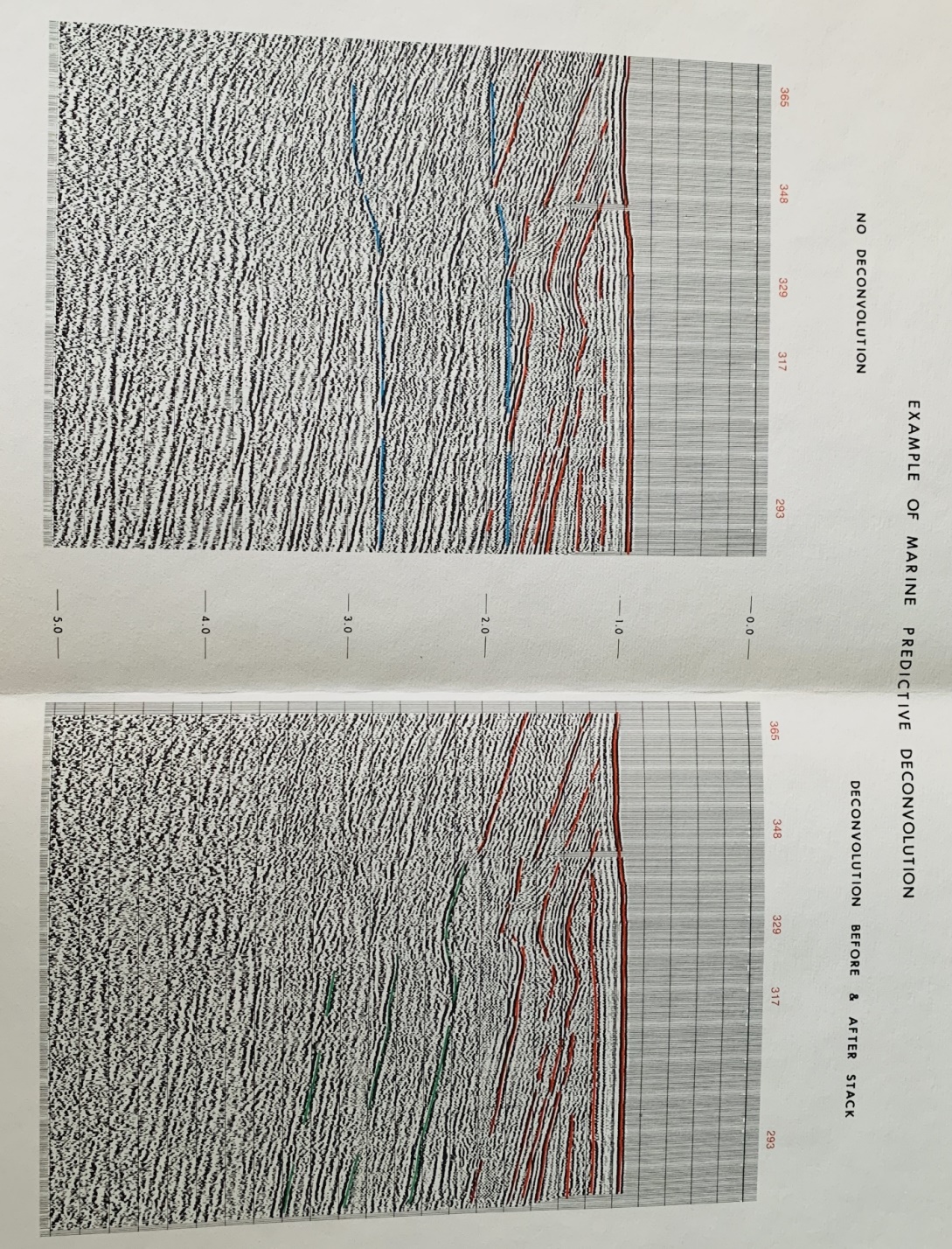
Deconvolved, filtered, and stacked CDP
marine seismic section
RMS Scaling used to enhance primary reflections
below hard water bottom.
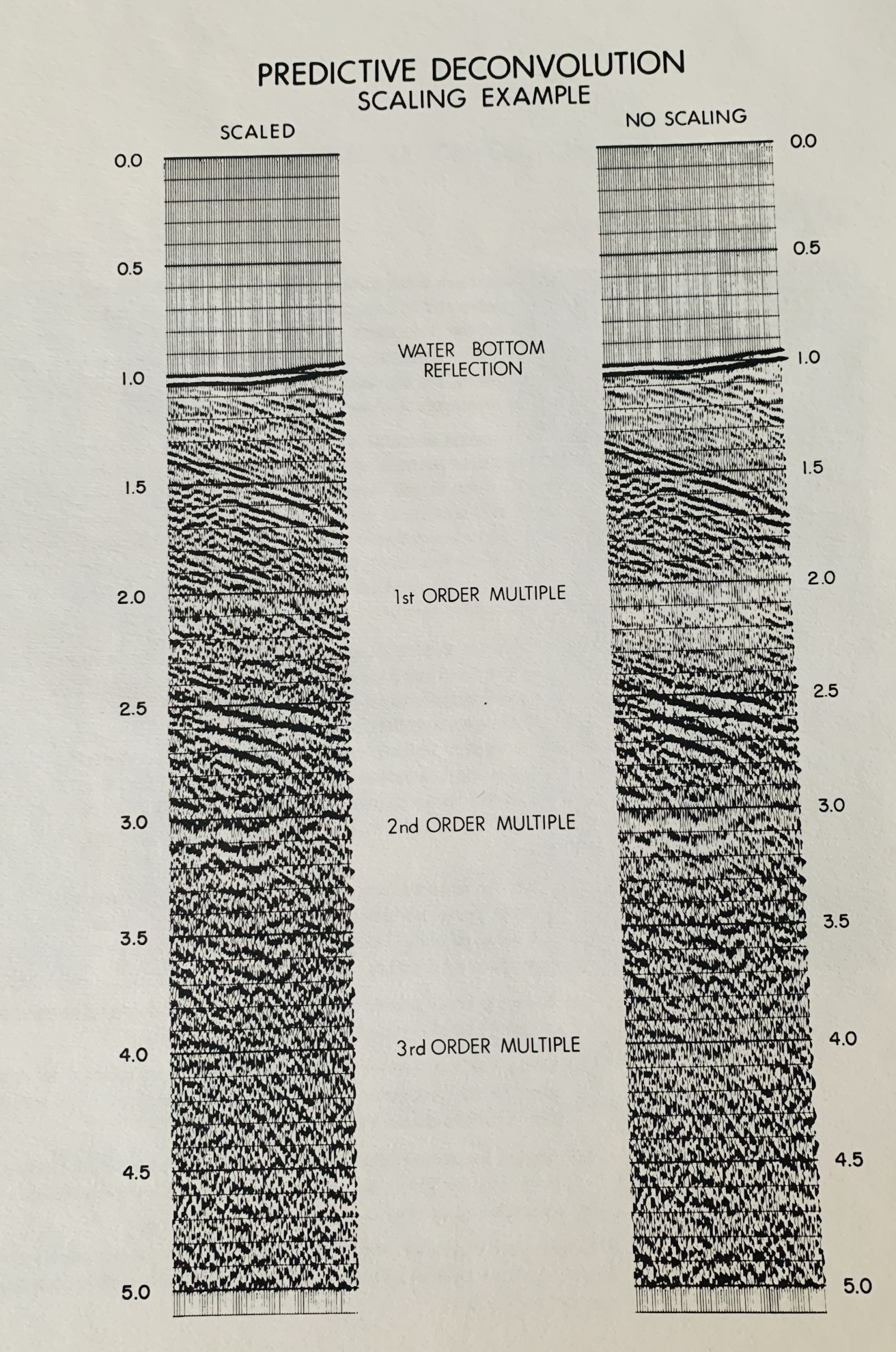
Predictive deconvolution example with scaling
applied.
SIGNATURE DECONVOLUTION
Another approach to the bubble problem is to analyze the signature
of the source impulse and its associated reverberatory train. The
signature can be found on the near trace prior to the water bottom
arrival or on an auxiliary channel especially used to record the
signature. In the example shown below the signature trace
has been extracted from the near trace and displayed to show the reverberatory content.
If a deconvolution operator is designed from this portion of the
near trace and applied to all portions of all traces of the record,
the bubbles should be eliminated, and at the same time, the primary
wavelets should be collapsed to the onset of energy. By comparing
autocorrelations before and after signature deconvolution, it is
clear that this is indeed the case. Autocorrelations are shown for
both the portion of the record prior to the water bottom arrival and
for a portion below the water bottom (Fig 6). In both cases the
bubble has been reduced significantly in amplitude.
The removal of bubble pulse effects from seismic data is a complex
problem. The recorded data may or may not contain the direct signal
as a distance and recognizable signature is made up of the original
impulse plus its bubble train. In the case where such a distinct
signature exists the solution is straight forward and the bubble
effects can be eliminated by means of a deconvolution operator
designed from that signature.
However, if the direct signature has not been recorded, the
following method can be utilized to obtain a first order
approximation of the signature:
(a)
Auto correlate the record and pick manually, or automatically, the
bubble pulse periodicities and their amplitudes taking the zero lag
value as unity. This yields a time series of spikes at those times
with those amplitudes.
(b)
Select a time gate on the record which is thought to contain the
primary signal with as little distortion as possible.
(c)
Using the time series obtained from (a) (with suitably modified
amplitudes if necessary), convolve the wavelet found in (b) with the
time series to obtain a synthetic signature.
(d)
Design a deconvolution operator using least squares techniques from
this synthetic signature and filter the entire sequence of records.
The approach obviously has to cope with a number of assumptions but
can be used successfully in shallow water cases where a direct
signature may not be available.
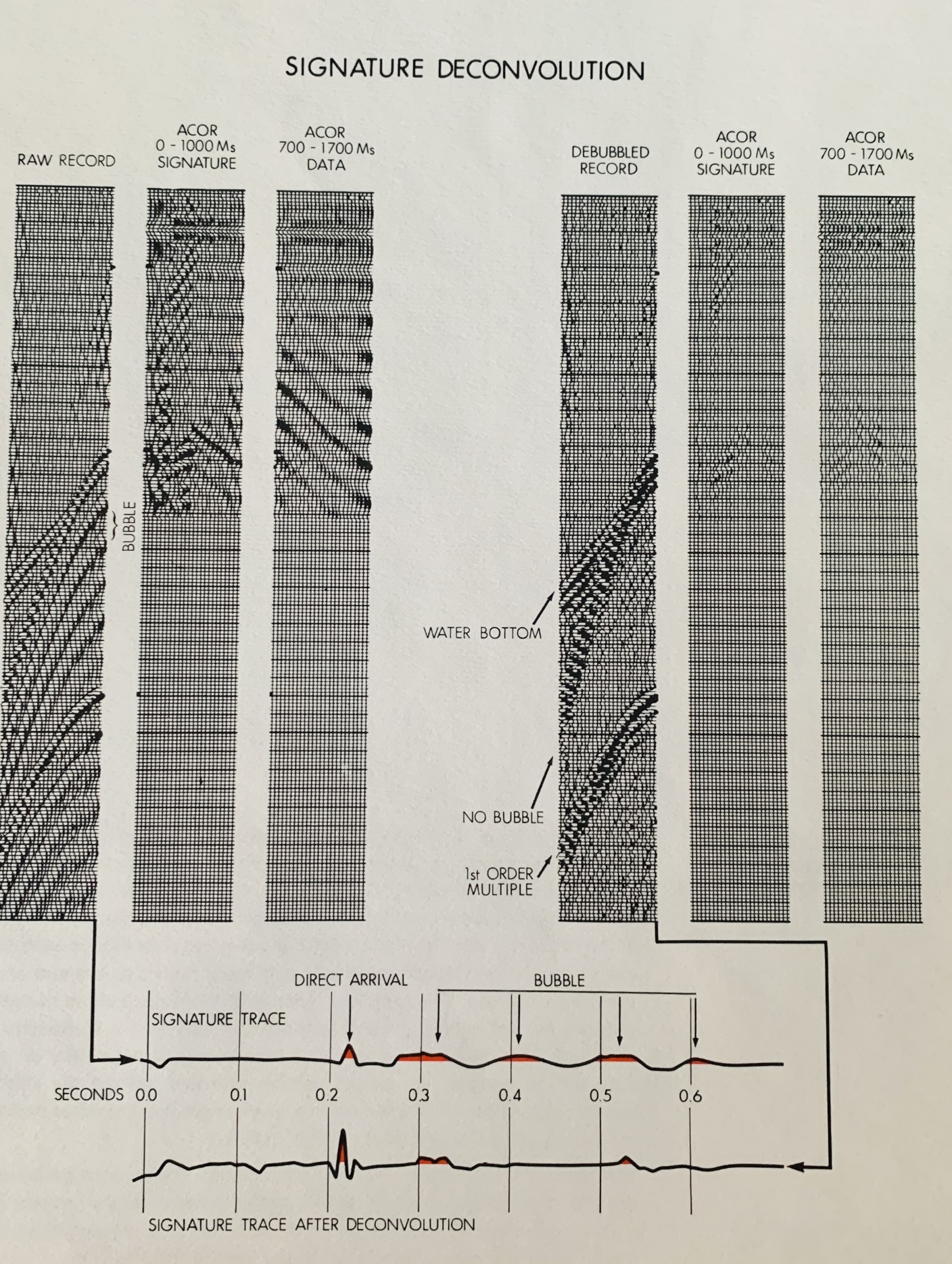
Seismic record and autocorrelations before and after
signature deconvolution.
COHERENT NOISE ATTENUATION
For cases in which interference can be predicted in time and space
by its velocity characteristics, a coherent noise attenuation
program (CONA) is used, which can reduce the amplitude of water
bottom multiples and interbed multiples to approximately the level
of the random noise. The results of the process are show below. The
first illustration (Fig 7) shows a 12 trace record before and after
the CONA process. The compete removal of the water bottom multiple
events is evident without any degradation of primary events. No
spectrum whitening is involved, so phase and frequency
characteristics of the data are unchanged.
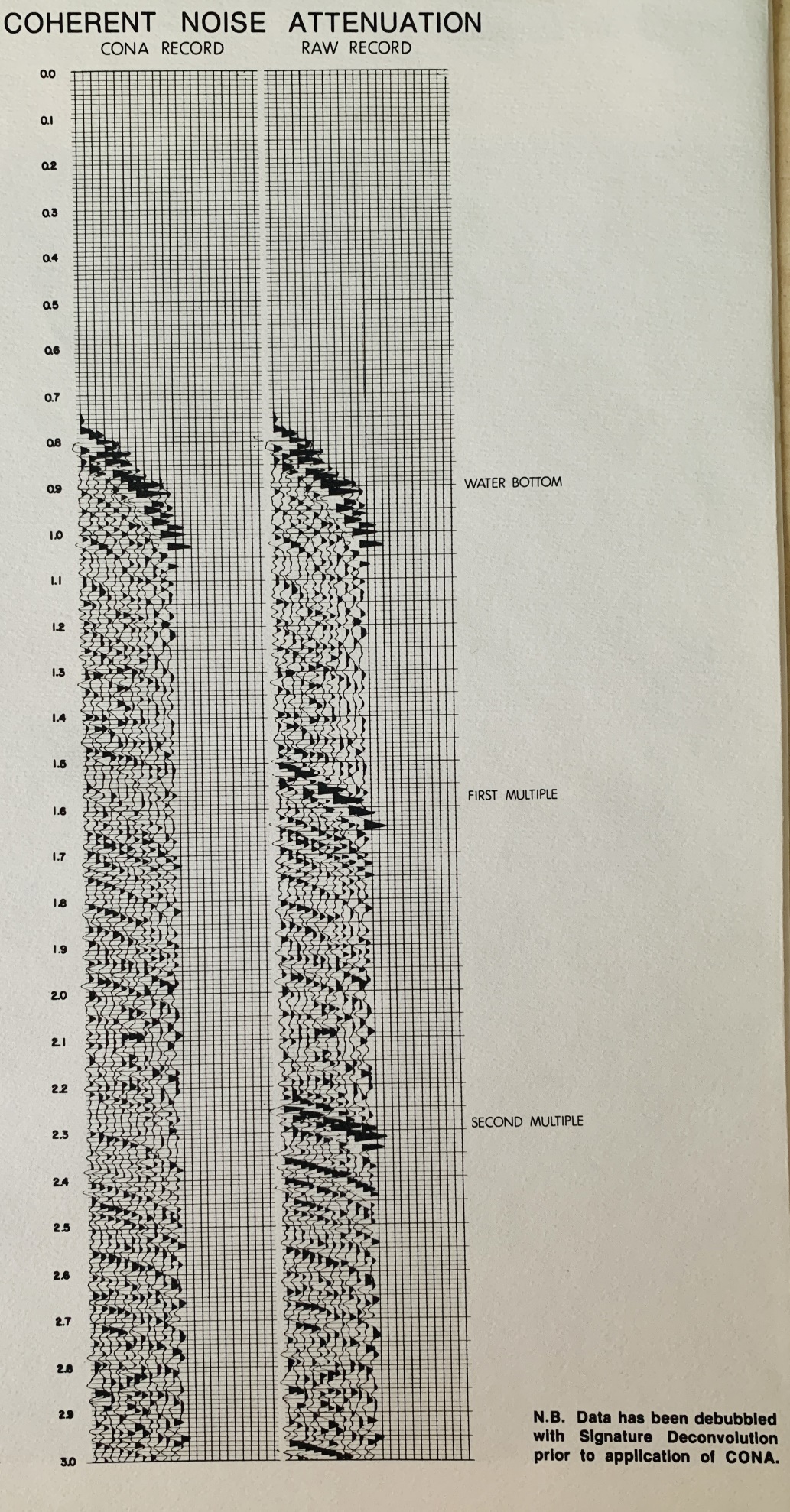
Coherent Noise Attenuation
A stacked section with and without the CONA process is shown below. The reflections which cross the first water bottom are
clearly visible after application of CONA.
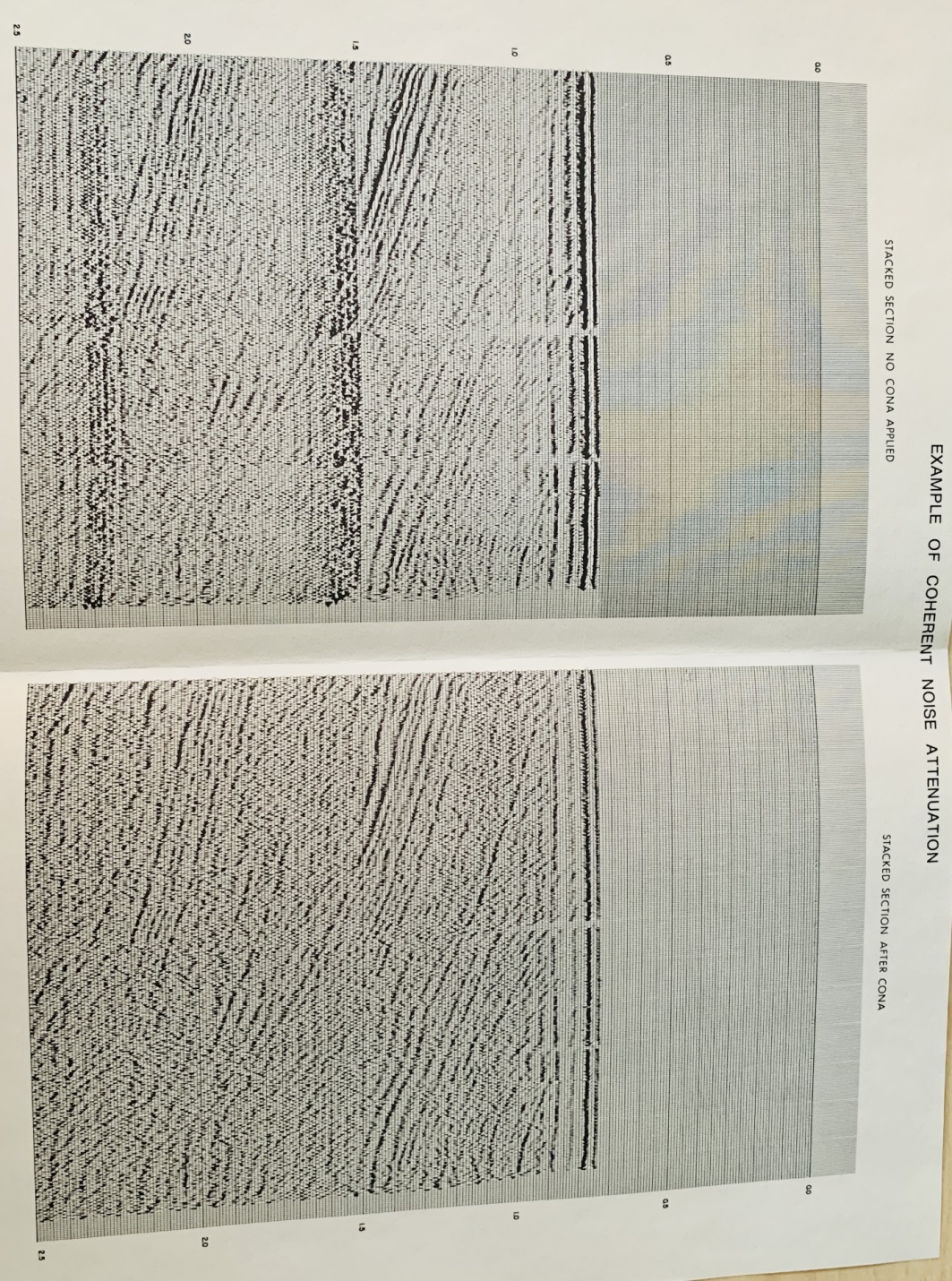
Example seismic section before and after coherent
noise attenuation.
The specialized programs described here for marine seismic data
processing, and where applicable on land seismic, provide versatile
and consistent removal of source bubble, water bottom,
single-bounce, and peg-leg multiple interference effects, even under
adverse data quality conditions. Most of the deconvolution operators
are developed automatically from analysis of the actual data set.
The coherent noise attenuation process allows for manual inputs if
shallow water depth or other conditions prevent the use of more
automatic techniques.
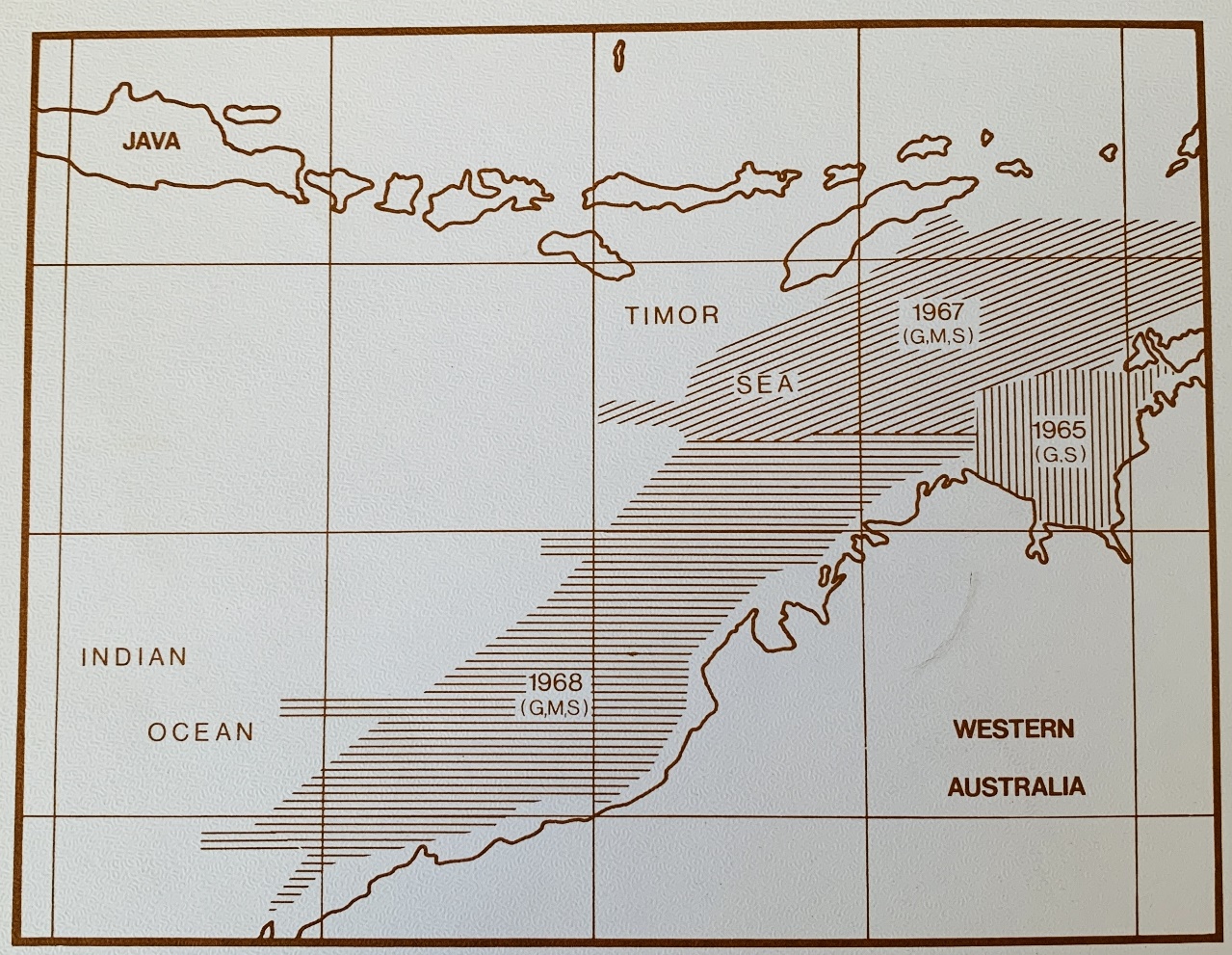
DIGITAL PROCESSING OF SPARKER SEISMIC DATA
Exploration management selects sparker surveys in order to get
accurate seismic reconnaissance information at a low cost. In the
late 1960s, analog recording of single-channel sparker surveys was
supplanted by digital tape, allowing digital enhancement to increase
frequency response and removal of multiple reflections and noise.
Experience with sparker surveys, combined digital corrections and
display of airborne magnetic and gravity data, showed great promise
in the 1970s and 1980s, and may still be useful in remote, hostile,
or ecologically sensitive environments.
Advantages of Digital Processing of Sparker Data
·
Optical presentation and scale uniformity: The client has their choice
of display made and scale. Time scale changes, sometimes present on
shipboard monitor sections, are eliminated.
·
Predictive deconvolution: Water bottom ringing, which makes
interpretation difficult, is attenuated.
·
Trace compositing: Signal to noise ratio of deep reflections may be
enhanced by compositing adjacent groups of traces.
·
Time variant filtering: Reflection quality may be enhanced by the
use of digital filters.
·
Time variant scaling: Deep data and low amplitude zones may be
brought out by the use of data dependent scaling programs.
A comparison of the field monitor seismic section and the digitally
processed section are shown below.
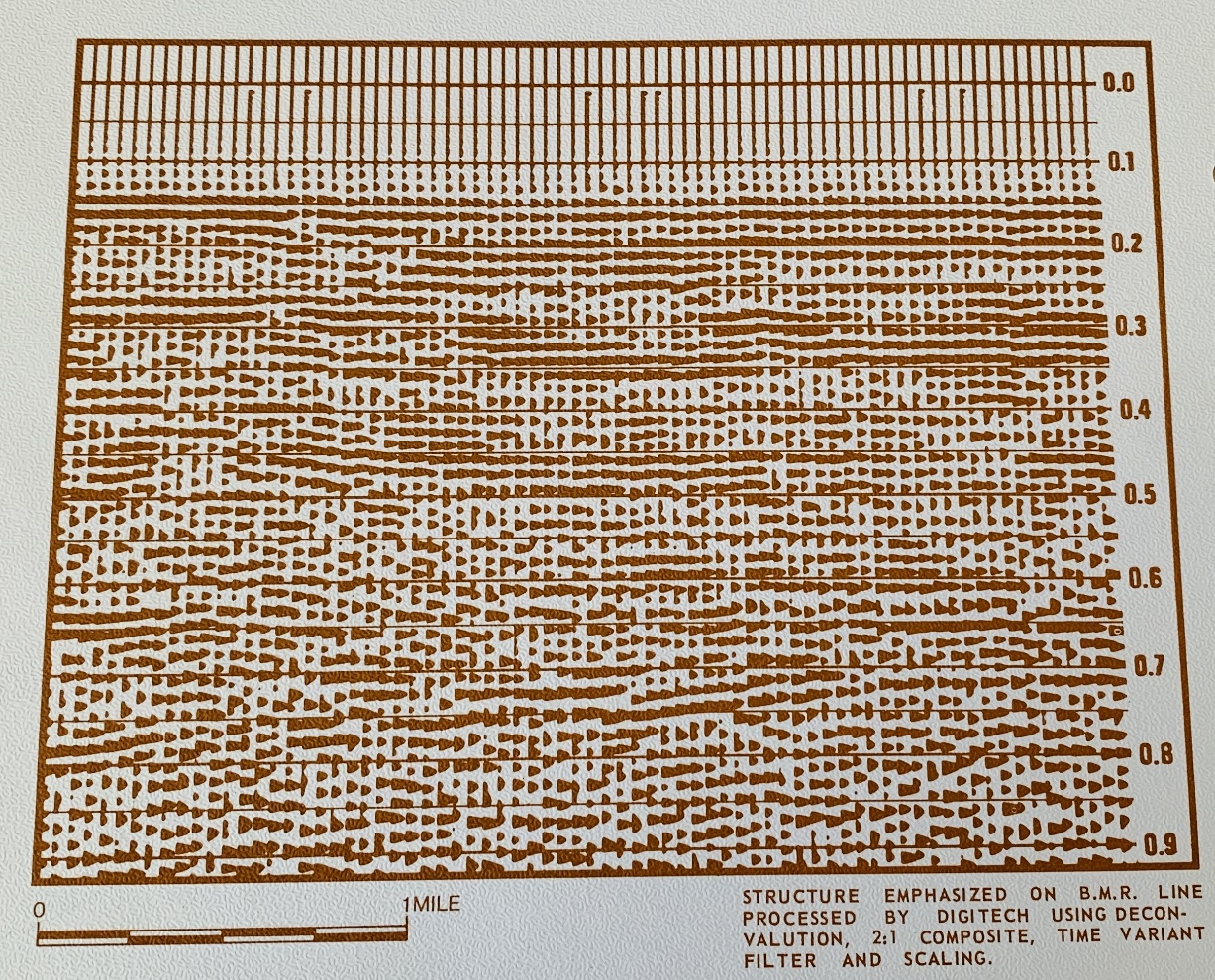
Structure emphasized on BMR sparker line processed by
using deconvolution, 2:1 composite time variant filter, and scaling.
This section is an example of a shipboard monitor
section from the Australian Bureau of Mineral Resources (BMR) survey
(single channel sparker), offshore NW Shelf, WA. Although these
sections are of good quality, and are helpful in doing a quick
interpretation, they do not give the geophysicist enough
information. Ringing, which obscures structure, can only be
attenuated by digital processing, which allows extraction of the
maximum information from the sparker data.
|
